ドローン運航管理システム(UTM)について
- 経営・マネジメント
- 製品・サービス

2022/2/2
目次
- ドローン運航管理システム(UTM)とは?
- UTM に関する海外の取組み状況
- UTM に関する日本の取組み状況
- UTM の標準化の動き
- UTM 使用時に想定されるリスク
- おわりに
ドローン運航管理システム(UTM)について- リスクマネジメント最前線PDF
執筆コンサルタント
千田遵
製品安全・環境本部 製品安全第一ユニット 主任研究員
加藤陽介
製品安全・環境本部 製品安全第一ユニット 上級主任研究員
専門分野:製品安全・施設安全
日本国内において、空撮や農薬散布、測量などで無人航空機(以下、ドローン)の活用が進んでいる。
これらのドローン活用では、現在は操縦者などが目視によって周囲の状況を監視し安全を確保している。しかしながら今後、物流・搬送、警備、点検、災害対応(捜索・救助)などでドローンを広く利用するためには、ドローンが操縦者などの目視範囲を超えて飛行(目視外飛行)することが必要となる。さらに、目視外環境下でのドローン飛行を実現するためには、ドローン同士や有人航空機などとの衝突を回避する仕組みが必要となる。
同じ事業者が複数台のドローンを同時に使用している場合は、機体同士の衝突を防止するために運航管理・調整を事業者内で実施すれば良いが、異なる事業者が運航するドローン同士の衝突を回避するためには、各事業者のドローンの運航を管理・調整することが必要になる。なお、有人航空機の管制のようにドローンの運航も特定の主体が一元的に把握して管理するという方法も考えられるが、ドローンは有人航空機と比較して多種多様な飛行(用途)が想定され、運用する事業者も多数となるため、同様な管理方法は難しいと考えられる。
そこで、目視外環境下で様々な事業者が運用する複数のドローンの空域の共有と、相互の安全を確保するために「ドローン運航管理システム(UTM)」の実現が求められている。
1. ドローン運航管理システム(UTM)とは?
ドローン運航管理システム(UTM;UAS[1] Traffic Management)とは、ドローンの運航者が複数いる空域でも、目視外環境下での安全かつ効率的な運航を実現するための概念、またはそのための管理システムである。
目視外環境下でのドローン飛行を実現するためには、操縦者の目視に代わってドローン周囲の状況を認識し、衝突などのリスクを回避する仕組みが必要となるが、これをドローン機上のセンサのみで実現するのは現状では困難である。そこで、UTM を通じて空域の情報、運航ルール、他のドローンや有人航空機に関する情報などを共有し、衝突などのリスクを未然に回避することが期待されている。
現在、UTM の具体化と社会実装に向けて、様々な国や地域で研究・開発や実証実験、制度整備が進められている。
2. UTM に関する海外の取組み状況
(1)米国の取組み状況
米国では、FAA(米国連邦航空局)と NASA(アメリカ航空宇宙局)が連携して UTM の研究・開発および実証実験を進めてきた[2]。実証実験は FAA と NASA だけではなく、連邦政府機関や産業界も関与している。
UTM における UAS はドローンを管理・制御するシステムを指しており、このサービス提供者は USS(UAS Service Supplier)と呼ばれる【図 1】。
当初は、政府主導の UTM モデル(FAA がドローン運航を直接管理する集中型)が検討されていたが、現在は民間主導モデル(複数の USS がドローン運航を管理する分散型)に向かっている。
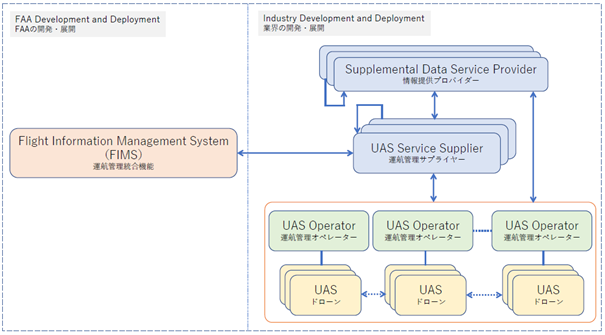
図1 Notional UTM architecture(FAA で想定する UTM アーキテクチャ)
出典:FAA「Concept of Operations v2.0[3] 」をもとに弊社作成
(2)欧州の取組み状況
欧州では、各国独自に UTM モデルを採用していたが、EU 航空安全局(EASA)と欧州委員会(EC)が協調モデルの採用に向けた新しい規則を公表した[4]。
欧州連合(EU)と欧州航空航法安全機構[5](Eurocontrol)によって 2007 年に設立された SESAR JU[6](Single European Sky ATM Research Joint Undertaking)が U-Space(UTM に近い管制システム)の研究・開発を取りまとめている。
U-Space については U1-U4 の 4 つのステップで実施することを公表している【図 2】。
U1-U4 の 4 つのステップは、以下の内容およびスケジュールで実施している。
- U1: 基本サービス [登録、識別情報、仮想的ジオフェンシング](2019 年)
- U2: 初期サービス [フライト計画、追跡、天候情報、緊急時対応 等](2021 年)
- U3: 先進サービス [衝突回避方策、キャパシティ管理 等](2025 年)
- U4: フルサービス(2030 年以降)
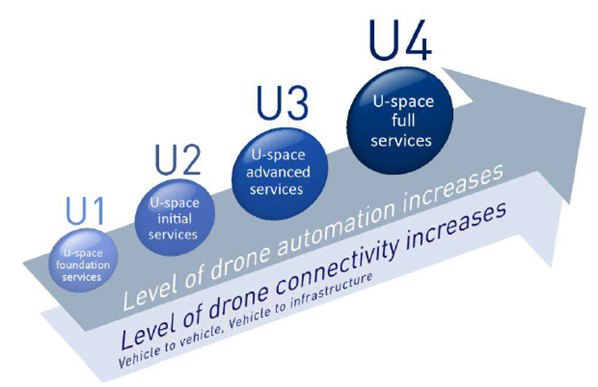
図2 U-space levels, from the U-space Blueprint(U-space のステップ)
出典:SESAR JU 「U-Space Concept of Operations[7] 」より抜粋
U-Space のプロジェクトでは、各国で規制当局、企業、研究機関が参加し、U-Space サービスに関する実証実験が実施されている。
3. UTM に関する日本の取組み状況
(1)DRESS プロジェクト
日本では、政府が掲げた「有人地帯での目視外飛行(レベル 4)[8]の実現」の目標に向けて、2017 年より国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」(DRESS プロジェクト)が実施されている[9]。その中のプロジェクトの一つとしてドローンの運航管理システム(UTM)の開発を実施している。
(2)運航管理システム(UTM)の開発
NEDO の DRESS プロジェクトにおいては、国立研究開発法人宇宙航空研究開発機構(JAXA)を中心として、ドローンの高密度・目視外飛行を実現するための運航管理方法を具体化した運用コンセプトを定義し、これを実現するシステムのアーキテクチャと共通インターフェースを設計した[10]。このツールとして運航管理シミュレータを開発し、空域の安全や利用効率などを評価してコンセプト/システム設計に反映するとともに、このシミュレータを用いて、システム開発要素(運航管理統合機能:FIMS[11]、運航管理機能:UASSP[12]、情報提供機能:SDSP[13]など)の部分的な検証や、各機能を組合せた統合的なシミュレーション検証/実証試験を実施し、運航管理システムの有効性を確認している【図 3】。
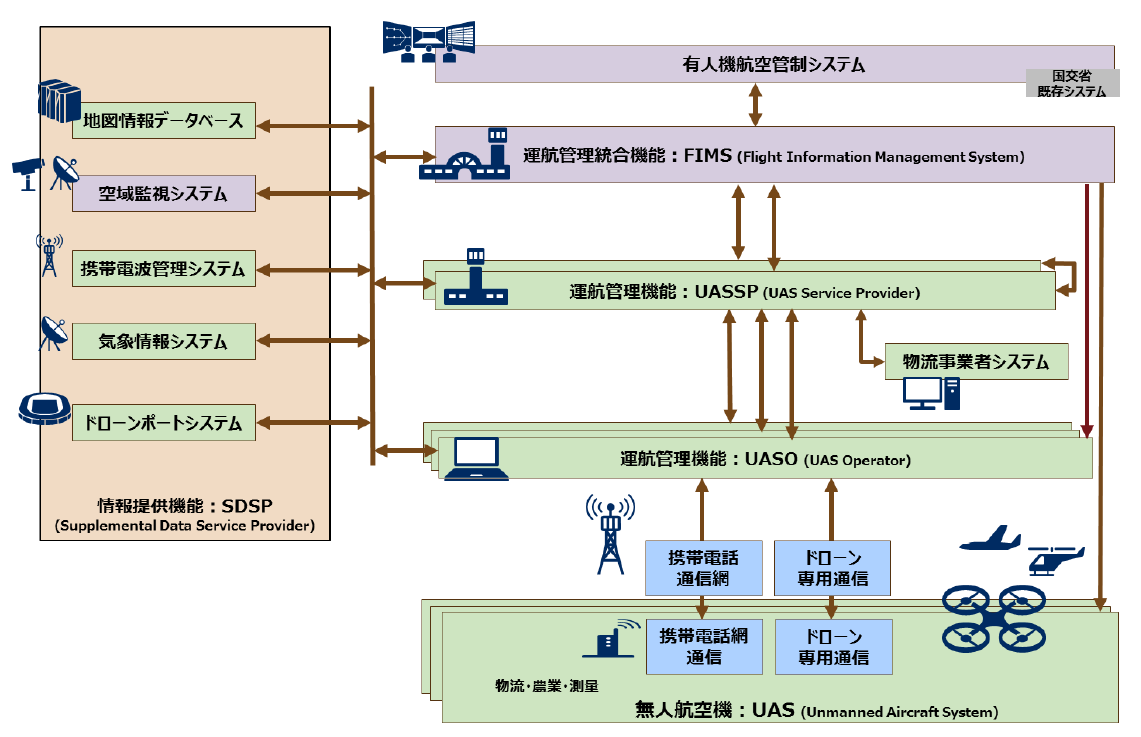
図 3 無人航空機運航管理システムのアーキテクチャ
出典:NEDO「『ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト』事業原簿【公開】[14]」より抜粋
(3)運航管理システムの実証実験
DRESS プロジェクトにおいて運航管理システムの実証実験が実施されている。
- 2019 年 2 月に NEDO および DRESS プロジェクトに参画している事業者によって「福島ロボットテストフィールド」(福島県南相馬市)で、同一空域で複数事業者のドローン(同時飛行数:10 機)が安全に飛行するための運航管理システムの実証試験が実施された。試験の結果、本プロジェクトで開発した運航管理統合機能(FIMS)、運航管理機能(UASSP)、情報提供機能(SDSP)で構成される運航管理システムが、正常に作動することが確認された。
- 2019 年 10 月の実証実験では、ドローンビジネスを展開する複数の一般企業も実証実験に参画し、福島ロボットテストフィールドの同一空域で複数事業者のドローン(同時飛行数:37 機)が安全に飛行するための運航管理システムとの相互接続試験を実施し、運航管理システムが正常に作動することが確認された。
- 2021 年 3 月の実証実験では、複数の拠点(福島ロボットテストフィールド、ドローンフィールド KAWACHI(茨城県稲敷郡河内町)、メーカー拠点(東京)の 3 拠点)から運航管理統合機能に接続する実証試験を実施し、運航管理統合機能が正常に作動することが確認された。
- 2021 年 11 月の実証実験では、全国 13 地域でドローン(同時飛行数:52 機)が安全に飛行するための運航管理システムとの相互接続試験を実施し、運航管理システムが、正常に作動することが確認された【表 1】。
| 実証地域 | ユースケース |
| 北海道稚内市 |
|
| 宮城県仙台市 |
|
| 福島県南相馬市 |
|
| 石川県白山市 |
|
| 岐阜県美濃加茂市 |
|
| 静岡県富士市 |
|
| 三重県志摩市 |
|
| 兵庫県洲本市、姫路市、 赤穂郡上郡町 |
|
| 高知県高岡郡四万十町 |
|
| 長崎県五島市 |
|
| 長崎県対馬市 |
|
| 大分県杵築市 |
|
| 宮崎県東臼杵郡美郷町 |
|
| 出典:NEDO「(ニュースリリース)国内最大規模、全国13地域で同時に飛行するドローンの運航管理に成功」をもとに弊社作成 | |
4. UTM の標準化の動き
米国、欧州、日本はそれぞれ UTM システムの研究・開発を推進しているが、UTM システムをグローバルで活用するためには国際的な標準化が求められる。
2014年にドローンの国際標準化の分科委員会として ISO/TC20/SC16 Unmanned aircraft systems(無人航空機システム)が、米国国家規格協会(ANSI)を事務局として設置された。ISO/TC20/SC16 は、24 カ国の参加メンバーと 11 カ国のオブザーバーで構成され、6 つの作業グループ(WG)と 1 つのジョイント作業グループ(JWG)と 1 つのアドホックグループ(AG)が活動している[15]【表 2】。
| NO | タイトル | 部会長(国) |
| WG1 | General(一般) | ドイツ |
| WG2 | Product manufacturing and maintenance(機体システム) | アメリカ |
| WG3 | Operations and procedures(運用手順) | イギリス |
| WG4 | UAS Traffic Management(運航管理) | 日本 |
| WG5 | Testing and evaluation(検査及び評価) | 中国 |
| WG6 | UAS subsystems(サブシステム) | 中国 |
| JWG7[16] | Noise measurements for UAS (騒音測定) | 中国 |
| AG5 | Detect And Avoid(衝突回避技術) | イギリス |
|
出典:ISO「ISO/TC 20/SC 16 Unmanned aircraft systems - STRUCTURE[17]」をもとに弊社作成 |
||
作業グループの 1 つである WG4(UAS Traffic Management)では、部会長を日本が担当しており、UTM に関する国際標準化を推進している。2021 年 9 月には、UTM に実装する地理空間情報の構成と項目などのデータモデルを定義した国際標準「ISO 23629-7 UAS Traffic Management (UTM) — Part 7: Data model for spatial data」が発行されている[18]。
| NO | タイトル |
| ISO/TR 23629-1:2020 | UAS Traffic Management (UTM) – Part1 : Survey results on UTM |
| ISO/DIS 23629-5 | UAS Traffic Management (UTM) – Part5 : UTM functional structure |
| ISO 23629-7:2021 | UAS Traffic Management (UTM) – Part7 : Data model for spatial data |
| ISO/CD 23629-8 | UAS Traffic Management (UTM) – Part8 : Remote identification |
| ISO/DIS 23629-12 | UAS Traffic Management (UTM) – Part12 : Requirements for UTM service provides |
|
出典:ISO「STANDARDS BY ISO/TC 20/SC 16 Unmanned aircraft systems[19]」をもとに弊社作成 |
|
5. UTM 使用時に想定されるリスク
ドローンの運航管理システム(UTM)を導入するだけではドローンの安全運航を確保できる(ドローンによる事故を予防する)わけではない。UTM 導入後も残存するリスクや UTM 導入により新たに生じるリスクも想定される。UTM 使用時に想定されるリスク例(一例)を以下に示す[20]【表 4】。
| 危険事象/危険行為シナリオ | 損害シナリオ(一例) |
| UTM に接続しないドローンが飛行する |
|
| コントローラー(手動)でドローンを操作する |
|
| UTM への申請とは異なる条件でドローンを飛行する |
|
| ネットワークハッキング/ドローンハッキング |
|
| ネットワークの途絶(通信障害、不通エリアの飛行) |
|
| UTM の不具合発生 |
|
| 運航管理者以外が UTM に接続する (ドローンの運用状況を確認する) |
|
ドローン事業者は、ドローンを運航する際には飛行エリア・使用用途・使用システム(ドローン機材、UTM システム)に応じてリスクアセスメントを実施し、リスクアセスメント結果に基づくリスク対策を検討・実施することが望まれる。
6. おわりに
日本国内においては、2021 年 6 月に「航空法等の一部を改正する法律」が成立し、2022 年 12 月までの法律の施行によって「レベル 4」(ドローンを有人地帯(第三者の上空)において、操縦者の目視の範囲を超えて自動飛行させることのできる飛行形態)の飛行が可能となる予定である。
事業者には、適切な UTM システムを採用したり、運航管理に関するリスクマネジメントを実施したりするなど、ルールに合わせて安全な運航管理体制を構築することが望まれる。
[2022 年 2 月 2 日発行]
参考情報
執筆コンサルタント
千田遵
製品安全・環境本部 製品安全第一ユニット 主任研究員
加藤陽介
製品安全・環境本部 製品安全第一ユニット 上級主任研究員
専門分野:製品安全・施設安全
脚注
| [1] | Unmanned Aircraft System の略称。UAS はドローンを制御するシステムの総称。ドローン自体を指すこともある。 |
| [2] | https://www.faa.gov/uas/research_development/traffic_management/ https://www.nasa.gov/utm |
| [3] | https://www.faa.gov/uas/research_development/traffic_management/media/UTM_ConOps_v2.pdf |
| [4] | https://www.easa.europa.eu/domains/civil-drones |
| [5] | https://www.eurocontrol.int/unmanned-aircraft-systems |
| [6] | https://www.sesarju.eu/ |
| [7] | https://www.sesarju.eu/sites/default/files/documents/u-space/CORUS%20ConOps%20vol2.pdf |
| [8] | 飛行レベルは以下の 4 つに定義されている。 飛行レベル1:目視内・操縦飛行、飛行レベル2:目視内飛行(操縦なし)、飛行レベル3:無人地帯での目視外飛行(補助者の配置なし)、飛行レベル4:有人地帯(第三者上空)での目視外飛行(補助者の配置なし) |
| [9] | Drones and Robots for Ecologically Sustainable Societies project の略称。 https://nedo-dress.jp/ |
| [10] | https://www.aero.jaxa.jp/research/star/uas/uas-safety/ |
| [11] | Flight Information Management System の略称。無人航空機や空域に関する情報を一元管理し、各運航者(運航管理機能(UASSP)、運航管理オペレーター(UASO))に飛行計画、運航状況などの無人航空機の運航状況の情報共有/提供を行う。 |
| [12] | UAS Service Provider の略称。運航管理オペレーター(UASO)が管理するドローンを安全に飛行させるため、運航管理システムにおいて、UASO に対する運航管理サービスを提供する。 |
| [13] | Supplemental Data Service Provider の略称。安全な運航に必要となる情報(地理空間情報(地形、建造物など)、気象情報、電波情報、人口統計情報など)を提供する。 |
| [14] | https://www.nedo.go.jp/content/100898607.pdf |
| [15] | 2022 年 1 月 18 日現在。 https://www.iso.org/committee/5336224.html |
| [16] | ISO/TC 20/SC 16 と ISO/TC 43/SC 1 の合同作業グループ |
| [17] | 2022 年 1 月 18 日現在。 https://www.iso.org/committee/5336224.html |
| [18] | https://www.meti.go.jp/press/2021/09/20210930001/20210930001.html |
| [19] | 2022 年 1 月 18 日現在。 https://www.iso.org/committee/5336224/x/catalogue/p/1/u/1/w/0/d/0 |
| [20] | 本リスク例は、UTM 使用時に想定されるリスクの例示であり、実際の UTM で発生することを示すものではない。また、リスク例は一例であり、確実性・網羅性を担保するものではない。 |